
Bạn có biết bộ điều khiển PID là gì không? Mục đích sử dụng của bộ điều khiển này là gì? Chúng có nguyên lý làm việc ra sao? Có những loại điều khiển PID nào đang được sử dụng phổ biến hiện nay? Tất cả sẽ được giải mã trong bài viết dưới đây của top1van. Mời mọi người cùng theo dõi nhé!
Điều khiển PID là gì?
-

Điều khiển PID là gì?
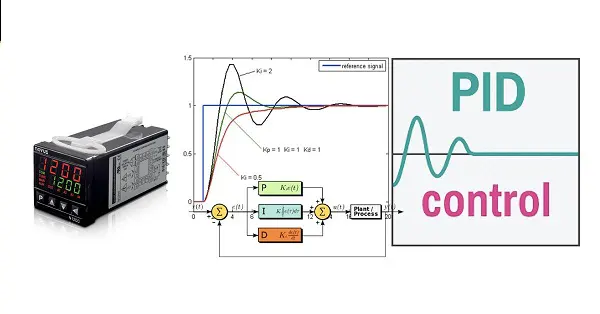
Điều khiển PID là bộ điều khiển có sự kết hợp của 3 bộ điều khiển: tỷ lệ, tích phân, vi phân. Với khả năng điều chỉnh sai số thấp và gia tăng độ đáp ứng, hạn chế sự dao đọng và làm giảm tốc độ vọt lố.
Bộ điều khiển PID là một thuật toán điều khiển cả quá trình tham gia vào trong các hành động với một mức thiết lập nhanh nhất và cho ra sai số thấp nhất. Bạn có thể hiểu một cách đơn giản là các tín hiệu sai số xảy ra sẽ được làm giảm tới mức tối thiểu nhất.
Bởi chúng chịu ảnh hưởng từ những tác động tỷ lệ, tác động tích phân. Nó đã được làm rõ bởi 1 tốc độ đã đạt được với những tác động vi phân số liệu từ trước đó. Điều khiển PID là 1 loại điều khiển có hồi tiếp vòng kín đã được dùng rất rộng rãi bên trong hệ thống điện, điện tử, tự động hóa,…
Ví dụ:
Khi bạn muốn điều khiển lò nung theo như mức cài đặt nhiệt độ bình thường đạt 38 độ C. Khi đã đạt tới ngưỡng 38 độ C, hệ thống sẽ tự động ngắt nhiệt. Nhưng mà dựa vào cách này chính là khả năng chính xác đạt 38 độ C sẽ thấp hơn vì các sai số lớn.
Do đó, khi dùng bộ điều khiển PID thì chúng sẽ điều chỉnh về giá trị điều khiển ngay ngõ ra Output. Sao cho những sai lệch giữa giá trị đo được từ hệ thống với những giá trị cài đặt nhỏ nhất có thể. Nó sẽ tạo được sự ổn định và đáp ứng nhanh.
Nói một cách đơn giản nhất về bộ điều khiển này như:
P – Đây là phương pháp điều chỉnh tỷ lệ và giúp tạo ra những tín hiệu điều chỉnh tỷ lệ với những sai lệch theo thời gian lấy mẫu.
I – Đây là tích phân sai lệch theo thời gian lấy mẫu. Điều này chính là phương pháp điều chỉnh để tạo ra những tín hiệu điều chỉnh khiến cho độ sai lệch giảm tới 0. Từ đó, ta cũng sẽ biết chính xác tổng sai số tức thời theo thời gian hoặc những sai số tích lũy từ trong quá khứ. Khi thời gian càng nhỏ thể hiện rõ tác động điều chỉnh tích phân ngày càng mạnh và tương ứng với độ lệch càng nhỏ.
D – Đây là vi phân của sai lệch. Điều này đã tạo ra tín hiệu điện việc điều chỉnh sao cho tỷ lệ với những tốc độ thay đổi sai lệch đầu vào. Thời gian càng lớn thì pham vi điều chỉnh vi phân sẽ càng mạnh. Nó cũng tương ứng với bộ điều chỉnh đáp ứng sự thay đổi đầu vào ngày càng nhanh.
Mục đích sử dụng bộ điều khiển PID là gì?
-

Mục đích sử dụng PID
PID là bộ điều khiển lý tượng bên trong các hệ thống điều khiển các quy trình hiện đại. Nó được dùng trong hầu hết những ứng dụng điều khiển tự đọng bên trong nền công nghiệp hiện nay. Nó dùng để điều chỉnh lưu lượng, áp suất, nhiệt độ,…
- Làm giảm tối đa nhất với những sai số xác lập.
- Hạn chế sự dao động.
- Giảm thời gian xác lập cũng như độ vọt lố.
Nguyên lý hoạt động của bộ điều khiển PID là gì?
-

Nguyên lý hoạt động của PID
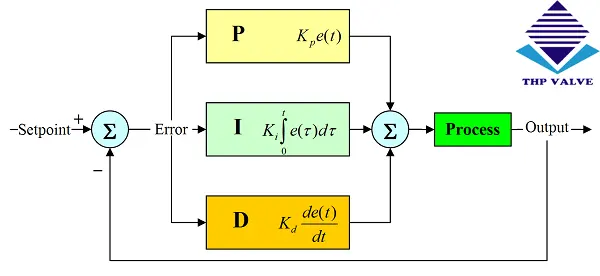
Nguyên lý hoạt động của những bộ điều khiển PID đều có điểm chung gần giống nhau. Mặc dù về mặt thiết kế, cấu tạo kiểu dáng những đầu đọc sẽ có sự khác biệt.
Đối với các quy trình điều khiển PID sẽ trải qua những giai đoạn như: Tiếp nhận – Phân tích – Phản hồi kết quả.
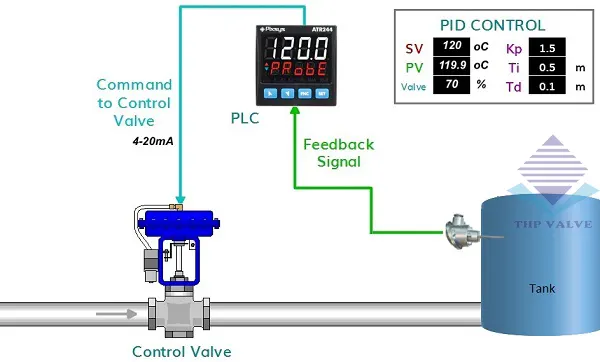
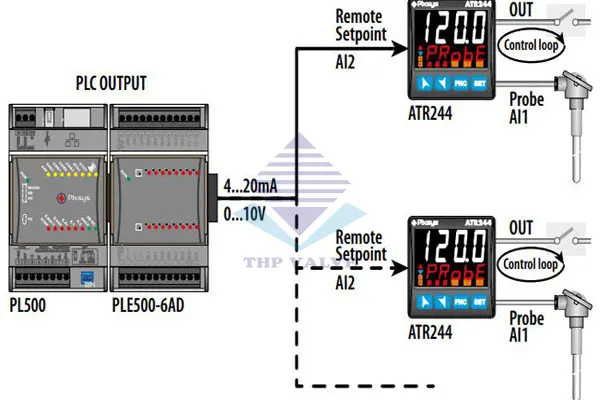
Tiếp nhận ở đây chính là cấp input đầu vào từ những thiết bị đo. Chẳng hạn, cảm biến nhiệt độ từ 0 – 1000 độ sẽ tương ứng với đầu ra là 4 – 20mA. Người ta sẽ gọi đây là loại đầu dò nhiệt 4-20mA.
Thì khi mà dòng 4-20mA tuyến tính từ cảm biến đo được và chúng sẽ phản hồi lại. Từ đó đầu đọc của PID sẽ có chức năng tiếp nhận.
Phần phân tích sẽ sử dụng những thiết kế mô hình đạo hàm tích phân đã có sẵn ngay trong đầu đọc nhanh nhất để truyền tới bộ phận phản hồi.
Bộ phận phản hòi sẽ cho thẳng ra kết quả tuyến tính với dòng tín hiệu 4-20mA output ra đóng mở van tuyến tính.
Chú ý: Việc đóng mở van với tốc độ nhanh hay chậm sẽ phụ thuộc vào quá trình cài đặt chúng ta đã cài cho chúng.
Các loại điều khiển PID
-

Các loại điều khiển PID phổ biến hiện nay
Hiện nay, bộ điều khiển PID đang có đến 4 loại được ứng dụng phổ biến hiện nay. Đó chính là:
- P – Bộ điều khiển tỷ lệ với tên tiếng anh là Proportional Controller.
- PI – Bộ điều khiển tỷ lệ và tích phân với tên tiếng Anh là Proportional and Intergral Controller.
- PD – Bộ điều khiển đạo hàm với tên tiếng Anh là Proportional and Derivative (PD) Controller.
- PID – Bộ điều khiển tỷ lệ – tích phân – đạo hàm (vi phân) và có tên tiếng anh là Proportional, Intergral and Derivative (PID) Controller.
Qua bài viết, chúng tôi hi vọng đã giúp bạn hiểu rõ hơn về khái niệm bộ điều khiển PID? Mục đích sử dụng? Nguyên lý làm việc? Các loại PID phổ biến hiện nay. Nếu bạn vẫn còn chưa hiểu rõ về mục nào, có thể liên hệ ngay với chúng tôi để được tư vấn cụ thể. Trong trường hợp thông tin vẫn còn thiếu sót, hãy comt bên dưới để chúng tôi bổ sung nhé!